
Selected Publications
My previous research areas mainly focus on: (1) robust perception for autonomous driving under adverse weather and lighting conditions, (2) generative AI for driving data synthesis (Sim2Real, controllable video generation), and (3) multi-modal 3D scene understanding (camera–LiDAR fusion, depth completion).
Preprints / Under Review

DriveCtrl: Conditioned Sim-to-Real Driving Video Generation
Preprint, 2026
Controllable sim-to-real translation of driving scenes at the video level — extending prior single-frame Sim2Real work to temporally consistent generation under structurally consistent conditioning.

AURORA-KITTI: Any-Weather Depth Completion and Denoising in the Wild
Under review, 2026
The first large-scale any-weather benchmark built upon KITTI, paired with a unified model that jointly denoises sparse LiDAR and completes dense depth across rain, snow, fog, and night.
Journal Articles
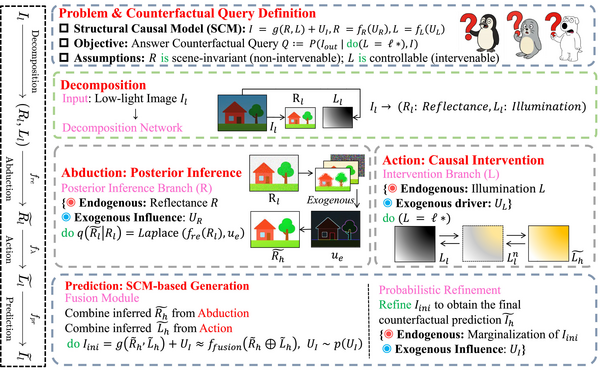
Rethinking Probabilistic Learning for Counterfactual Low-Light Image Enhancement in Robust Engineering Vision Systems
Knowledge-Based Systems, 2026
Reframes low-light enhancement as a counterfactual probabilistic learning problem — modelling what a scene would look like under normal lighting — to better support downstream perception in engineering vision systems.
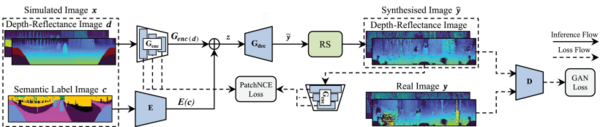
A Unified Generative Framework for Realistic LiDAR Simulation in Autonomous Driving Systems
IEEE Sensors Journal, 2025
A single generative framework that replaces per-effect simulation pipelines, producing realistic LiDAR point clouds that match real sensor statistics across diverse driving conditions.
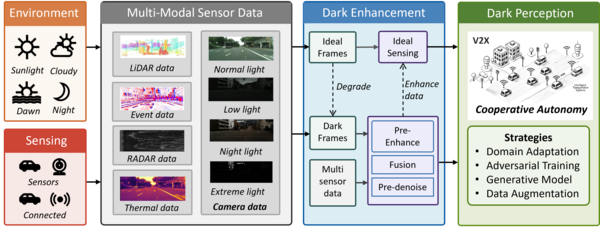
A Survey and New Perspective of Sensing in the Dark for Intelligent Transportation Systems
IEEE Transactions on Intelligent Transportation Systems, 2025
The first unified survey of camera, LiDAR, radar, and thermal sensing for nighttime intelligent transportation, with a new taxonomy and a roadmap of open challenges.
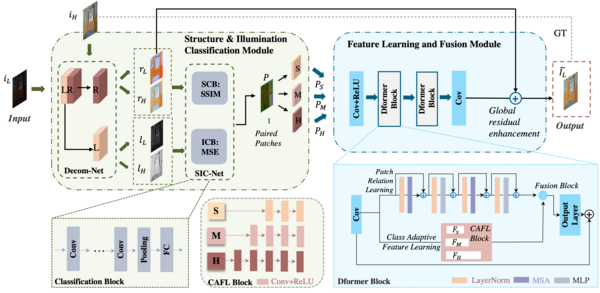
ClassLIE: Structure- and Illumination-Adaptive Classification for Low-Light Image Enhancement
IEEE Transactions on Artificial Intelligence, 2024
First classifies each low-light image by its structural and illumination priors, then routes it to an adaptive enhancement branch — a single model that handles diverse degradation types without manual tuning.
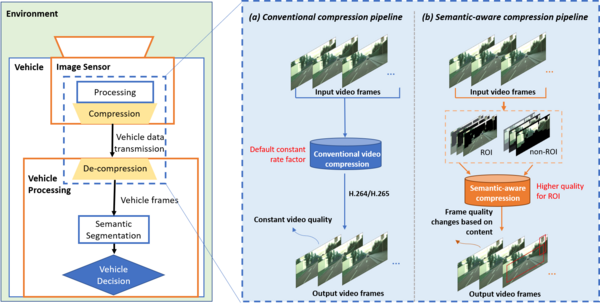
Semantic-Aware Video Compression for Automotive Cameras
IEEE Transactions on Intelligent Vehicles, 2023
Allocates bitrate by per-pixel semantic importance so safety-critical regions (pedestrians, signs) stay sharp at low bitrates. Industry collaboration with ON Semiconductor.
Conference Papers
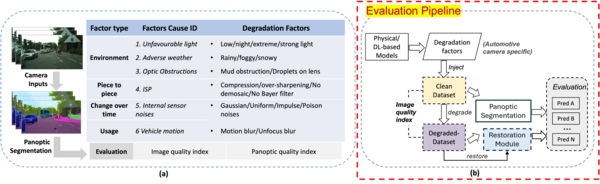
Robustness of Panoptic Segmentation for Degraded Automotive Camera Data
ICRA, 2026 | also in IEEE Transactions on Automation Science and Engineering, 2025
The first systematic benchmark of panoptic segmentation under realistic automotive camera degradations (noise, blur, compression, weather), with a training recipe that recovers most of the accuracy loss.

Darwick: A Paired Dataset in Low-Light Driving Scenarios for Advanced Perceptual Enhancement and Benchmarking Assessment
IEEE ITSC, 2024
A paired day–night driving dataset captured on matching routes — enabling supervised low-light enhancement and benchmarking where synthetic pairs fall short.
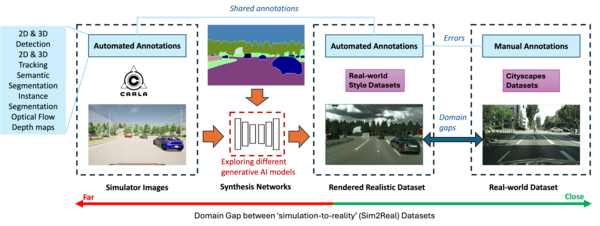
Exploring Generative AI for Sim2Real in Driving Data Synthesis
IEEE IV, 2024
Shows how modern generative AI (GANs and diffusion) can translate simulated driving scenes into photorealistic data while preserving task-relevant structure — narrowing the Sim2Real perception gap.
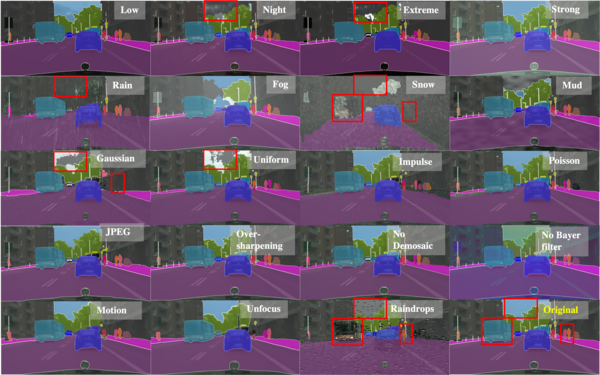
The Effect of Camera Data Degradation Factors on Panoptic Segmentation for Automated Driving
IEEE ITSC, 2023 (oral)
Decouples and quantifies how individual camera degradation factors (noise, blur, compression) each impact panoptic segmentation — motivating degradation-aware training.